
Post-doctoral Research
My research focuses on studying the kinematics of a fish school and understanding hydrodynamic interaction using a fish robot.
• George V. Lauder, Connor F. White, Divya Ramesh, Yu Pan, Julia Chaumel, Yangfan Zhang. ”Six questions in fish locomotor biology and the technical approaches needed to address them.” Journal of Experimental Biology (Accepted).
• Yangfan Zhang, Divya Ramesh, Hungtang Ko, and George V. Lauder. “Fish locomotor variation: connecting energetics and kinematic modulation.” Philosophical Transactions of the Royal Society B (Accepted).
Doctoral Research
My research focused on studying and understanding animal and robot locomotion on 3-D complex terrain and wet flowable substrates. It was divided into two parts based on the environment: (1) developing a sensorized snake robot to study the use of tactile sensing in snakes to traverse complex 3-D terrains and (2) studying and understanding amphibious fish locomotion on mud with mud strength variation.
(1) Sensorized snake robot to understand snake locomotion on complex 3-D environment:
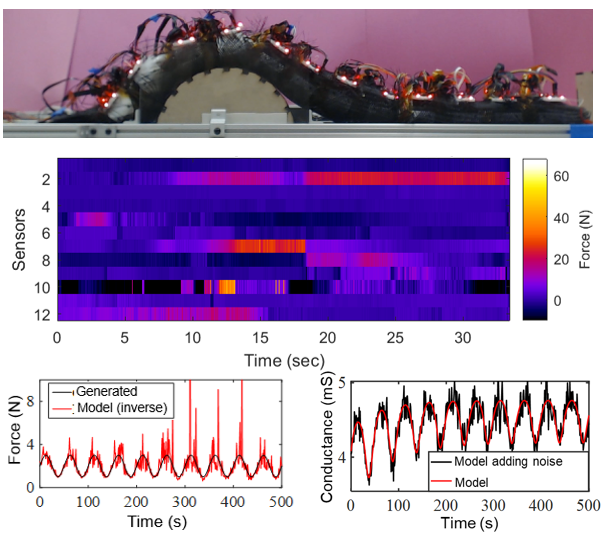
Built a sensorized snake robot, SenSnake, to study how snakes use terrain-body contact forces to traverse a complex 3-D environment. Explored a model-based calibration considering the viscoelastic behavior of the piezoresistive sensor, which will be useful for future studies. Developed a force estimation model using the model-based calibration to estimate forces based on sensor input.
• Divya Ramesh, Qiyuan Fu, and Chen Li. ”SenSnake: A snake robot with contact force sensing for studying locomotion in complex 3-D terrain.” 2022 International Conference on Robotics and Automation (ICRA), pp. 2068-2075. IEEE, 2022. PDF
(2) Amphibious fish locomotion on mud with various strengths:

Designed and conducted animal experiments with three model organisms to study three distinct strategies seen in amphibious fishes moving on mud with varying mud strength. Developed tools and methods to characterize and control the mud strength during the study. Performed systematic study on the performance of mudskipper using appendicular locomotion and mode transitions on different mud strengths. Performed preliminary study on the performance of bichir using axial appendicular locomotion and ropefish using axial locomotion on different mud strengths. Currently studying lifting in amphibious fishes using a robophysical model on different mud strengths.
• 2 journal preprints have been submitted.
• Ramesh, D., Zhang, H., Kim, D., Nath, A., Dai, N., Collum, D., Ubaydullaev, A., Vincent, C., Pollard, C., Sadalgekar, G., & Li,
C. (2025). Use of body lifting by elongate amphibious fishes to move on mud. Integrative and Comparative Biology, 65. (Atlanta,
GA, Talk) Abstract
• Ramesh, D., Sadalgekar, G., Zhang, H., Tan, J., Kim, D., Nath, A., Fu, Q., Souders, Z., Pollard, C., An, L., & Li, C. (2024).
Comparative biological and robophysical study of amphibious fishes moving on mud of variable strength. Bulletin of the American
Physical Society, 69. (Minneapolis, MN, Talk) Abstract
• Ramesh, D., Sadalgekar, G., Fu, Q., Souders, Z., Rao, J., & Li, C. (2023). Biological and robophysical experiments of terrestrial
fish locomotion on mud of controlled, variable strength. Bulletin of the American Physical Society, 68. (Vegas, NV, Talk) Abstract
• Ramesh, D., Fu, Q., Sadalgekar, G., Souders, Z., Tan, J., Moon, L., Rao, J., Urban, M., Ivanova, M., Mehta., K. K., An, L., & Li,
C. (2023). Studying terrestrial fish locomotion on wet deformable substrates. Integrative and Comparative Biology, 63. (Austin,
TX, Talk; Best Student Paper Competition Finalist) Abstract
Master’s Research
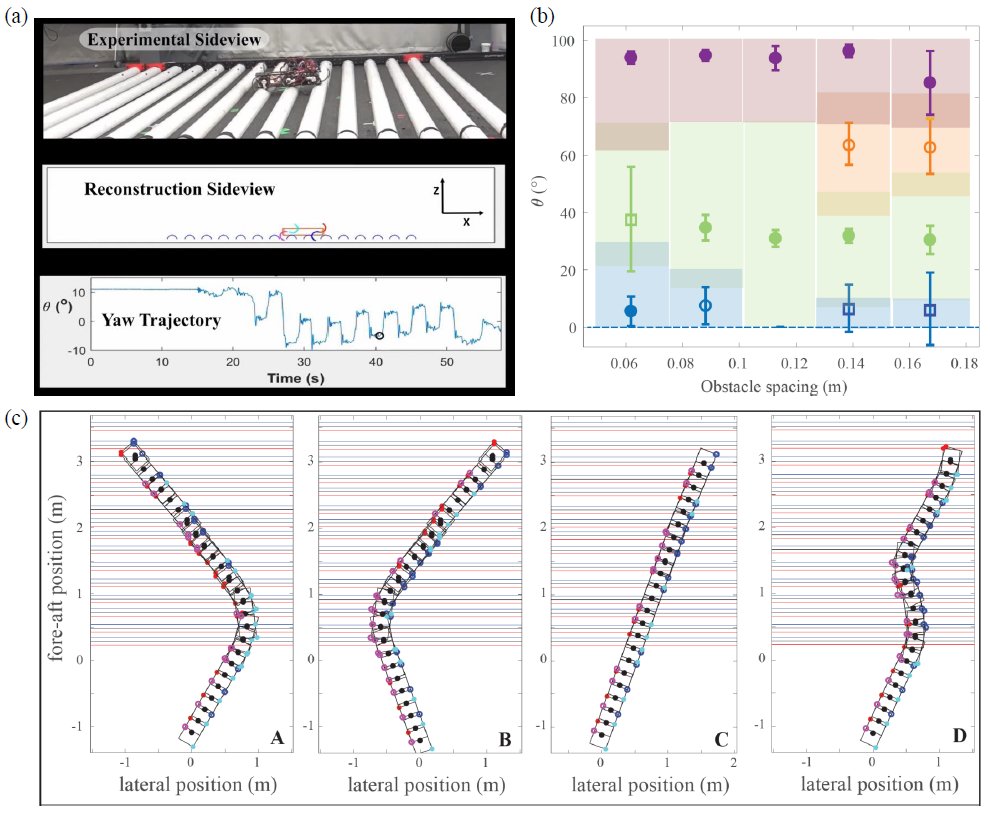
Investigated the behavior and dynamics of legged robot during obstacle interaction under the guidance of Prof. Daniel E. Koditschek as part of master’s thesis. The objective is to model the complex non-linear behavior of robot-obstacle interaction into a simple linear system. Programmed the HQRHEX robot using C++ that allowed the robot to move with different gaits and stride frequency using a controller. Created an algorithm to automatically generate the optimum window of data where the robot enters the equilibrium state and stays there till the end of the periodic obstacles. Built a 3-dimensional reconstruction of the robot-obstacle interaction using the experiment results. Developed an algorithm to identify contact points between the obstacle and the legs, and on flat ground to help understand the change in contact point pattern when the robot shows different behaviors during the obstacle traversal.
• Divya Ramesh, Anmol Kathail, Daniel E. Koditschek, and Feifei Qian. ”Modulation of Robot Orientation via Leg-Obstacle Contact Positions.” IEEE Robotics and Automation Letters 5, no. 2 (2020): 2054-2061. PDF
Undergraduate Research
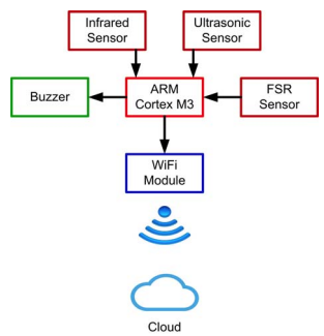
Developed an Assistive Device for the Visually Impaired as part of the undergraduate thesis. Programmed ARM Cortex M3 processor using embedded C language to collect the values from two distance sensors, calculate the distance and transmit it wirelessly to a web page.
• †Rakshith, M. N., †Divya Ramesh, S. Sundar, and M. Shanmugasundaram. ”An efficient assistive system for the visually impaired.” ARPN Journal of Engineering and Applied Sciences 12, no. 19 (2017). PDF (†Equal contribution)